Vizualizare
şi simulare în MAPLE
Exemple
Studenţi: Marian-Silviu Tălmăcel Oana-Adriana BasarabăCristian-Laurenţiu Giorgi
Roxana-Elena StăniloiuÎndrumător: conf. dr. Mădălina Buneci
1. Introducere
“O imagine valorează mai mult
decât 1000 de cuvinte”. Acesta este un
principiu pe care oamenii de ştiinţă îl folosesc de secole
pentru a transmite informaţii despre concepte ştiinţifice, date
şi modele.
Scopul acestei lucrări este de exemplifica folosirea mediului Maple
pentru vizualizarea şi simularea unor fenomene legate de aplicarea
metodelor numerice. Mai precis lucrarea constă în crearea unor proceduri
Maple pentru vizualizarea/simularea metodelor bisecţiei şi tangentei
(pentru rezolvarea ecuaţiilor neliniare) şi pentru aproximarea
funcţiilor prin polinoame de interpolare.
Pentru claritate la începutul fiecărei secţiuni s-a prezentat pe
scurt metoda pentru care s-au creat proceduri de vizualizare/simulare.
2. Rezolvarea ecuaţiilor
Presupunem date a, bÎR, f: [a,b] ® R. Problema pe care o studiem
este determinarea numerelor reale xÎ[a,b] cu proprietatea că f(x) = 0.
Numim un număr real x*Î[a,b] cu proprietatea că f(x*) = 0, soluţie
(sau rădăcină)
a ecuaţiei f(x) = 0.
Dacă f : [a,b] ® R, este o funcţie continuă cu
proprietatea că
f(a)f(b) < 0, atunci există cel puţin o rădăcină x*
Î(a,b) a ecuaţiei f(x) = 0. Rădăcina ecuaţiei f(x) =
0 nu este neapărat unică.
2.1. Metoda bisecţiei
Fie f : [a,b] ® R, o funcţie continuă cu
proprietatea că f(a)f(b) < 0. Atunci
există cel puţin o rădăcină x* Î(a,b) a ecuaţiei
f(x)=0. Pentru găsirea rădăcinii se micşorează la
fiecare pas intervalul în care funcţia îşi schimbă semnul.
Metoda bisecţiei presupune înjumătăţirea la fiecare pas a
acestui interval. Astfel:
·
se determină mijlocul c = (a + b)/2 al
intervalului (a,b).
·
dacă f(c)f(a)<0, atunci se continuă
algoritmul cu intervalul [a,c]
·
dacă f(c)f(b)<0, atunci se continuă
algoritmul cu intervalul [c,b]
·
dacă f(c) =0 s-a determinat o
rădăcină a ecuaţiei f(x) = 0.
Se construieşte astfel un
şir de intervale (In)n , In = [an,
bn], cu lungimea lui In egală cu jumătate din
lungimea lui In-1. Fiecare din aceste intervale conţine o
soluţie a ecuaţiei f(x) = 0. Presupunem că se dă o precizie
e>0.
Considerăm
că cn mijlocul intervalului In este o
aproximaţie satisfăcătoare a soluţiei ecuaţiei f(x) =
0 dacă lungimea lui In este mai mică decât e. Dacă notăm Ln
= |bn - an| lungimea intervalului In,
avem Ln = Ln-1/2 = ... = L0/2n = |b-a|/2n. Ca urmare Ln
< e dacă şi numai
dacă |b-a| /2n < e sau echivalent n > ln(|b-a|/e)/ln(2).
Algoritm
Date de intrare:
f continuă, a, b cu f(a)f(b)<0
e (precizie)
Date de ieşire:
c mijlocul intervalului In = [an, bn] cu | an-bn
|<e (c este o
aproximaţie a unei rădăcini x* Î(a,b) a ecuaţiei f(x) =
0 cu eroarea absolută |x*-c| < e/2).
nmax:=[ln(|b-a|/e)/ln(2)] +1;
c: =(a+b)/2;
![]() pentru
j = 0, 1, ...., nmax execută
pentru
j = 0, 1, ...., nmax execută
![]() dacă
f(c) = 0 atunci j : = nmax +1
dacă
f(c) = 0 atunci j : = nmax +1
![]() altfel dacă f(c)f(a)<0 atunci b : = c; altfel a : = c;
altfel dacă f(c)f(a)<0 atunci b : = c; altfel a : = c;
c: =(a+b)/2;
Rata convergenţei
pentru metoda bisecţiei este liniară.
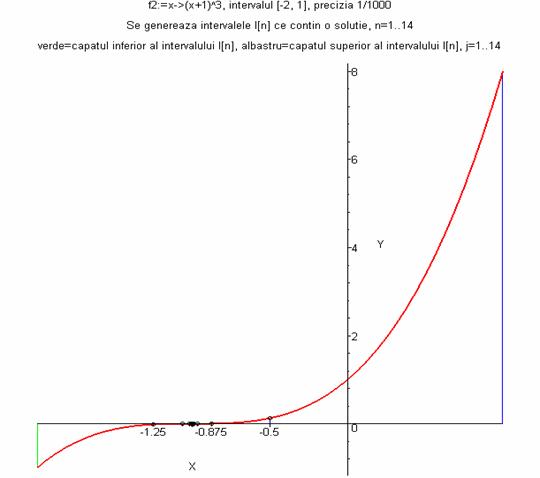
Propunem două variante de vizualizare a metodei. În prima varianta se reprezintă grafic
funcţia f: [a, b] ® R şi se marchează cu verde
capetele inferioare ale intervalelor [an,
bn] şi cu albastru capetele superioare. Pentru fiecare cn:
= (an + bn)/2 se marchează cu un cerculeţ
punctul de pe grafic (cn, f(cn)). Procedura Maple de mai
jos are drept parametrii funcţia f, capetele intervalului iniţial
(notate A, B) şi precizia e.
> desen_bisectie:=proc(f,A,B,epsilon)
local n,i,d1,d2,d3,c,a,b,an,bn,xn,j,nmax,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string)
,`, intervalul [`,
convert(A,string), `, `,convert(B,string),`],
precizia `,
convert(epsilon,string));
a:=A;b:=B;
an:=[a];bn:=[b];c:=(a+b)/2;xn:=[c];
nmax:=floor(ln(abs(B-A)/epsilon)/ln(2))+1;
for j from 0 to nmax do
if f(c)=0 then j:=nmax+1 else
if evalf(f(c)*f(a))<0 then
b:=c;an:=[op(an),a];bn:=[op(bn),c];
else a:=c;an:=[op(an),c];bn:=[op(bn),b]; fi;
c:=(a+b)/2;
xn:=[op(xn),c] fi od;
n:=nops(xn);titlu:=cat(titlu,`\nSe genereaza
intervalele I[n] ce
contin o solutie, n=1..`,convert(n,string),
`\nverde=capatul inferior
al intervalului I[n], albastru=capatul superior
al intervalului I[n],
j=1..`,convert(n,string));print(xn);
d1:=plot(f(t),t=an[1]..bn[1],axes=normal,color=COLOR(RGB,1,0,0),
labels=[X,Y],thickness=2,xtickmarks=map(evalf,xn));
display(d1,display([seq(display(plot([[evalf(an[i]),t,t=min(0,
evalf(f(an[i])))..max(0,evalf(f(an[i])))],[evalf(bn[i]),t,t=min(0,
evalf(f(bn[i])))..max(0,evalf(f(bn[i])))]],
color=[COLOR(RGB,0,1- i/(2*n),0),COLOR(RGB,0,0,1-i/(2*n))],
thickness=1),pointplot([xn[i],f(xn[i])],symbol=CIRCLE,color=black,
thickness=15)),i=1..n)],title=titlu))
end;
Pe graficele de mai jos vedem
reprezentarea cu ajutorul procedurii desen_bisectie a aproximării prin metoda bisecţiei a soluţiilor
ecuaţiilor: x8-3x-3 = 0 şi (x+1)3 = 0.
> f1:=x->
x^8-3*x-3;
> f4:=x->(x+1)^3;
> desen_bisectie(f1,-3/2,1,10^(-3));
![]()
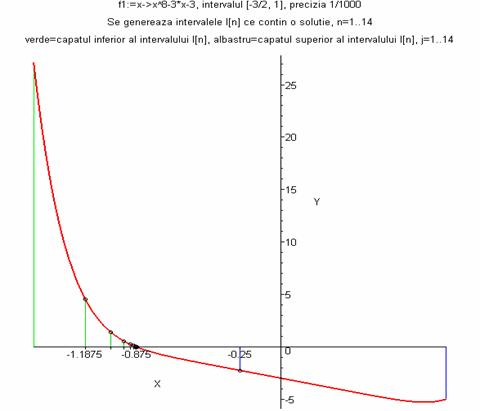
Lista
![]()
este
lista mijloacelor intervalele generate (mijoacele intervalelor reprezintă
aproximaţii ale rădăcinii ecuaţiei)
> desen_bisectie(f4,-2,1,10^(-3));
![]()
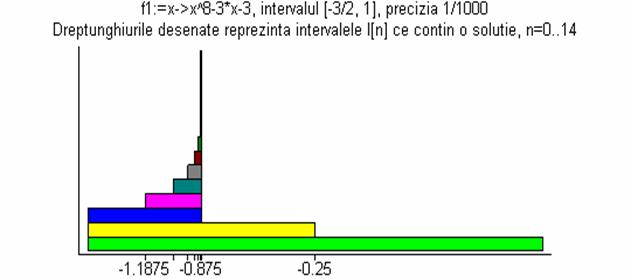
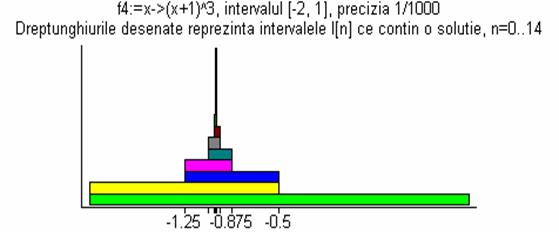
În cea de-a doua variantă se reprezintă cele [ln(|b-a|/e)/ln(2)] +1 intervale prin dreptunghiuri de culori diferite. Procedura desen_bisectie1 are aceiaşi parametrii ca desen_bisectie.
> with(plottools):
> desen_bisectie1:=proc(f,A,B,epsilon)
local n,i,d1,d2,d3,c,a,b,abn,an,bn,xn,j, nmax,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string)
,`, intervalul [`,
convert(A,string), `, `,convert(B,string),`],
precizia `,
convert(epsilon,string));
a:=A;b:=B; an:=[a];bn:=[b];c:=(a+b)/2;xn:=[c];
nmax:=floor(ln(abs(B-A)/epsilon)/ln(2))+1;for j
from 0 to nmax do
if f(c)=0 then j:=nmax+1 else
if evalf(f(c)*f(a))<0 then
b:=c;an:=[op(an),a];bn:=[op(bn),c];
else a:=c;an:=[op(an),c];bn:=[op(bn),b]; fi;
c:=(a+b)/2; xn:=[op(xn),c] fi od;
n:=nops(xn);
titlu:=cat(titlu,`\nDreptunghiurile desenate
reprezinta intervalele
I[n] ce contin o solutie,
n=0..`,convert(n,string));
abn:=seq([an[i],bn[i]],i=1..n); print(abn);
display(seq(rectangle([an[i],i*0.1],[bn[i],(i+1)*0.1],
filled=true,color=COLOR(RGB,(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(irem(i,7)+1,2),(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(iquo(irem(i,7)+1,2),2),(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(iquo(irem(i,7)+1,4),2))),
i=1..n),axes=framed,title=titlu,xtickmarks=map(evalf,xn),
ytickmarks=[]);
end;
Pe graficele de mai jos se pot observa intervalele In = [an,
bn] obţinute prin aplicarea metodei bisecţiei (fiecare
având lungimea egală cu jumătate din lungimea precedentului şi
conţinând o soluţie a ecuaţiei). Înainte de reprezentarea
grafică procedura desen_bisectie1 afişează şirul
de intervale obţinut.
> desen_bisectie1(f1,-3/2,1,10^(-3),5);

![]()
> desen_bisectie1(f4,-2,1,10^(-3),5);

![]()
Procedurile animatie_bisectie şi
animatie_desen_bisectie1 sunt variantele animate ale procedurilor desen_bisectie, respectiv desen_bisectie1. Procedura animatie_bisectie1 este o variantă
a procedurii animatie_bisectie în care, în loc
să se marcheze pe grafic punctul corespunzător aproximaţiei
curente a rădăcinii, se uneşte cu linie punctată mijlocul
intervalului curent de pe axa OX cu punctul corespunzător de pe grafic.
> animatie_bisectie:=proc(f,A,B,epsilon,m)
local n,i,d1,d2,d3,c,a,b,an,bn,xn,j, nmax,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string) ,`,
intervalul [`,
convert(A,string), `, `,convert(B,string),`],
precizia `,
convert(epsilon,string));
a:=A;b:=B;
an:=[a];bn:=[b];c:=(a+b)/2;xn:=[c];
nmax:=floor(ln(abs(B-A)/epsilon)/ln(2))+1;
for j from 0 to nmax do
if f(c)=0 then j:=nmax+1 else
if evalf(f(c)*f(a))<0 then
b:=c;an:=[op(an),a];bn:=[op(bn),c];
else a:=c;an:=[op(an),c];bn:=[op(bn),b]; fi;
c:=(a+b)/2; xn:=[op(xn),c] fi od;
n:=nops(xn);titlu:=cat(titlu,`\nSe genereaza
intervalele I[n] ce
contin o solutie, n=1..`,convert(n,string),
`\nverde=capatul inferior
al intervalului I[n], albastru=capatul superior al
intervalului I[n],
j=1..`,convert(n,string));print(xn);
d1:=plot(f(t),t=an[1]..bn[1],axes=normal,color=COLOR(RGB,1,0,0),
labels=[X,Y],thickness=2,xtickmarks=map(evalf,xn));
display(d1,display([seq(display(plot([[evalf(an[i]),t,t=min(0,
evalf(f(an[i])))..max(0,evalf(f(an[i])))],[evalf(bn[i]),t,t=min(0,
evalf(f(bn[i])))..max(0,evalf(f(bn[i])))]],color=[COLOR(RGB,0,1,0),
COLOR(RGB,0,0,1)]),pointplot([xn[i],f(xn[i])],symbol=CIRCLE,
color=black,thickness=15))$m,i=1..n)],title=titlu,insequence=true))
end;
> animatie_bisectie1:=proc(f,A,B,epsilon,m)
local n,i,d1,d2,d3,c,a,b,an,bn,xn,j,
nmax,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string) ,`, intervalul [`,
convert(A,string), `, `,convert(B,string),`], precizia `,
convert(epsilon,string));
a:=A;b:=B;
an:=[a];bn:=[b];c:=(a+b)/2;xn:=[c];
nmax:=floor(ln(abs(B-A)/epsilon)/ln(2))+1;
for j from 0 to nmax do
if f(c)=0 then j:=nmax+1 else
if evalf(f(c)*f(a))<0 then b:=c;an:=[op(an),a];bn:=[op(bn),c];
else a:=c;an:=[op(an),c];bn:=[op(bn),b]; fi; c:=(a+b)/2;
xn:=[op(xn),c] fi od;
n:=nops(xn);
titlu:=cat(titlu,`\nSe genereaza intervalele I[n] ce contin o solutie,
n=1..`,convert(n,string), `\nverde=capatul inferior al intervalului
I[n], albastru=capatul superior al intervalului I[n],
j=1..`,convert(n,string));print(xn);
d1:=plot(f(t),t=an[1]..bn[1],axes=normal,color=COLOR(RGB,1,0,0),
labels=[X,Y],thickness=2,xtickmarks=map(evalf,xn));
display(d1,display([seq(display(plot([[an[i],t,t=min(0,
evalf(f(an[i])))..max(0,evalf(f(an[i])))],[bn[i],t,t=min(0,
evalf(f(bn[i])))..max(0,evalf(f(bn[i])))]],labels=[X,Y],
color=[COLOR(RGB,0,1,0),COLOR(RGB,0,0,1)],linestyle=[SOLID,SOLID],
thickness=[2,2]),pointplot([[xn[i],0],[xn[i],f(xn[i])]],connect=true,
linestyle=DOT,symbol=CIRCLE,color=black,thickness=1))$m,i=1..n)],
title=titlu,insequence=true));
end;
> animatie_desen_bisectie1:=proc(f,A,B,epsilon,m)
local n,i,d1,d2,d3,c,a,b,abn,an,bn,xn,j,
nmax,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string) ,`, intervalul [`,
convert(A,string), `, `,convert(B,string),`], precizia `,
convert(epsilon,string));
a:=A;b:=B;
an:=[a];bn:=[b];c:=(a+b)/2;xn:=[c];
nmax:=floor(ln(abs(B-A)/epsilon)/ln(2))+1;
for j from 0 to nmax do
if f(c)=0 then j:=nmax+1 else
if evalf(f(c)*f(a))<0 then b:=c;an:=[op(an),a];bn:=[op(bn),c];
else a:=c;an:=[op(an),c];bn:=[op(bn),b]; fi;
c:=(a+b)/2; xn:=[op(xn),c] fi od;
n:=nops(xn);
titlu:=cat(titlu,`\nDreptunghiurile desenate reprezinta
intervalele
I[n] ce contin o solutie,
n=0..`,convert(n,string));
abn:=seq([an[i],bn[i]],i=1..n);print(abn);
display([seq(display(seq(rectangle([an[i],i*0.1],[bn[i],(i+1)*0.1],
filled=true,color=COLOR(RGB,(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(irem(i,7)+1,2),(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(iquo(irem(i,7)+1,2),2),(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(iquo(irem(i,7)+1,4),2))),
i=1..j),axes=framed,title=titlu,xtickmarks=map(evalf,xn),
ytickmarks=[]),j=1..n)],insequence=true);
end;
Pentru exemplificare:
click pe definiţia funcţiilor de mai jos
2.2. Metoda tangentei
Metoda tangentei este utilizată pentru determinarea unei
rădăcini a ecuaţiei f(x) = 0. Presupunem că f este
derivabilă şi că derivata nu se anulează.
Rădăcina ecuaţiei este determinată ca limita unui şir.
Se pleacă de la un punct x0 dat. Presupunând că s-a
construit termenul xn-1, termenul xn se determină ca
fiind abscisa intersecţiei dintre tangenta la graficul funcţiei în xn-1
şi axa Ox.
Ecuaţia
tangentei în (xn-1, f(xn-1)) este:
y – f(xn-1) = ![]() (xn-1)(x – xn-1)
(xn-1)(x – xn-1)
Deci intersecţia cu axa Ox se află rezolvând
sistemul
În consecinţă ,
xn = xn-1
- ![]() .
.
Convergenţa şirului este determinată de termenul
iniţial x0. Dacă x0 este într-o vecinătate
suficient de mică a soluţiei atunci şirul converge.
Următoarea teoremă stabileşte condiţii suficiente pentru
convergenţa metodei tangentei.
Teoremă (Metoda tangentei). Fie f : [a, b] ® R o aplicaţie de două ori
derivabilă cu următoarele proprietăţi: f’(x)¹0, f”(x) ¹ 0 oricare ar fi
xÎ[a, b] şi f(a)f(b)<0. Atunci unica
soluţie x* a ecuaţiei f(x) = 0 este limita a şirului (xn)n
definit prin:
xn = xn-1 - ![]() , n ³ 1
, n ³ 1
unde x0Î [a, b] este ales astfel încât f(x0)f”(x0) >
0. În plus, oricare ar fi n ³ 1 eroarea absolută cu care termenul xn aproximează x*
verifică următoarele inegalităţi:
|x* - xn| £ ![]()
|x* - xn| £![]()
unde m1
= ![]() şi M2
=
şi M2
= ![]() .
.
Algoritm
Date de intrare:
f
- funcţia care determină ecuaţia (f(x) = 0)
x0 - aproximaţia iniaţială
e >0 -precizia (determină condiţia de oprire a
iteraţiilor)
Nmax numărul maxim de termeni
din şir ce urmează a fi calculaţi (Nmax)
Date de
ieşire: xN cu proprietatea că N este cel mai mic
număr natural pentru care
| xn -
xn-1 | < e sau n > Nmax
unde (xn)n
este şirul corespunzător metodei tangentei (xN este
considerat o aproximaţie satisfăcătoare a unicei soluţii a
ecuaţiei f(x)=0)
x1 := x0;
x2 : = x1 - ![]() ;
;
n : = 1;
![]() cât timp (| x2 –
x1 | ³ e ) şi (n £ Nmax) execută
cât timp (| x2 –
x1 | ³ e ) şi (n £ Nmax) execută
x1 := x2;
x2 : = x1 - ![]() ;
;
n : = n + 1;
Vom studia aproximarea soluţiilor
a 4 ecuaţii diferite prin
această metodă.
ex+2x+1=0
(x+1)1/3=0
sin(x)+x-1=0
sin(x)=0
Procedura desen_mtangenta are ca parametrii funcţia f, aproximaţia iniţială x0,
precizia ε şi numărul maxim de termeni calculaţi – Nmax.
> desen_mtangenta:=proc(f,x0,epsilon,Nmax,m)
local a,b,xn,x1,x2,n,df,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string)
,`, aproximatia initiala
x0=`, convert(x0,string),`, precizia = `, convert(epsilon,string));
df:=D(f); x1:=x0; xn:=[x1];
n:=0;x2:=x1-f(x1)/df(x1); xn:=[op(xn),x2];
n:=n+1;
while (evalf(abs(x2-x1))>=epsilon)and
(n<Nmax) do
x1:=x2;x2:=x1-f(x1)/df(x1);xn:=[op(xn),x2];n:=n+1
od; n:= nops(xn);
titlu:=cat(titlu,`\nSe deseneaza cu albastru
tangentele la grafic in
punctele (x[n], `,f,`(x[n])),
n=0..`,convert(n-2,string));
print(xn);
a:=min(seq(xn[i],i=1..n))-2*epsilon;
b:=max(seq(xn[i],i=1..n))+2*epsilon;
display(plot(f(t),t=a..b,color=COLOR(RGB,1,0,0),thickness=2,
labels=[X,Y],xtickmarks=map(evalf,xn)),display([seq(
display(pointplot([[xn[i],0],[xn[i],f(xn[i])]],connect=true,
symbol=CIRCLE,thickness=1,linestyle=DOT,
color=COLOR(RGB,0,0,0))$(3*m),
pointplot([[xn[i+1],0],[xn[i],f(xn[i])]],connect=true,thickness=1,
linestyle=SOLID,
color=COLOR(RGB,0,0,1)))$m,i=1..n-1)],title=titlu))
end;
Aplicăm
procedura următoarelor funcţii
> f2:=x->exp(x)+2*x+1;
> f3:=x->surd(x+1,3);
> f5:=x->sin(x)+x-1;
> f6:=x->sin(x);
Exemplificările au fost alese pentru a
evidenţia diverse fenomene ce pot apărea.
> desen_mtangenta(f2,4.,10^(-3),10);
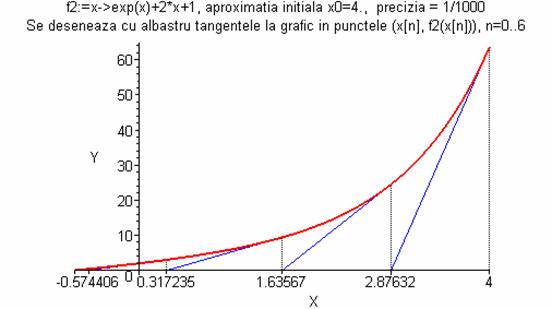
Pe graficul de mai sus observăm cum şirul
construit prin metoda tangentei converge rapid către soluţia
ecuaţiei ex+2x+1=0.
> desen_mtangenta(f3,-3.,10^(-3),10);
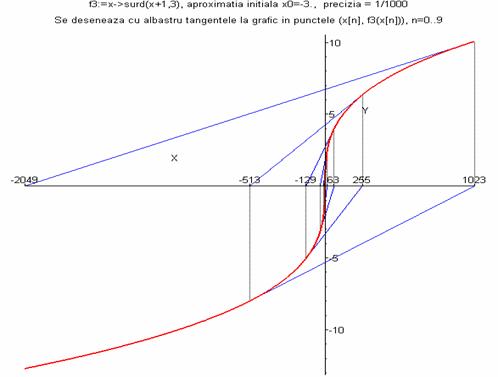
De această dată observăm că
şirul construit prin metoda tangentei nu converge la soluţia
ecuaţiei (x+1)1/3=0 (funcţia nu este derivabilă în -1)
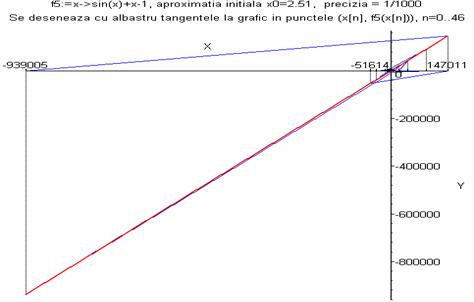
> desen_mtangenta(f5,2.51,10^(-3),10);
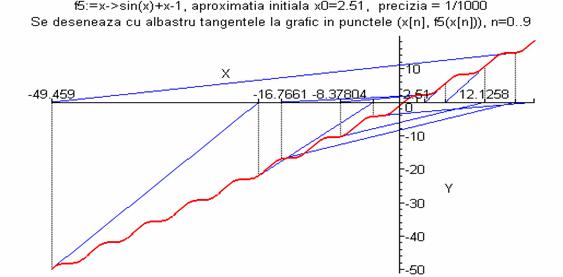
Se
observă că termenii
şirului construit prin metoda tangentei se depărtează de
soluţie, însă dacă luăm un număr mai mare de
aproximări (Nmax), termenii
şirului converg către soluţie.
> desen_mtangenta(f5,2.51,10^(-3),50);
> desen_mtangenta(f6,1.41,10^(-3),10);
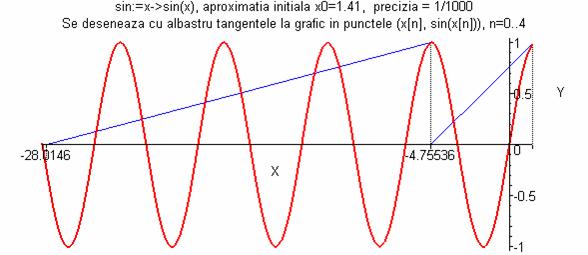
Pentru ecuaţia sin(x)=0 şirul construit prin metoda tangentei
converge către soluţie, dar nu către cea mai apropiată
(dacă aproximaţia iniţială este luată în
vecinătatea unui punct în care se anulează funcţia cos).
Prezentăm două
variante animate ale procedurii desen_mtangenta. Procedura animatie_mtangenta generează n cadre, în fiecare
cadru i fiind desenat graficul funcţiei şi tangenta la grafic în punctul
(xi, f(xi)).Parametrul suplimentar, m, este utilizat drept
factor de încetinire.
> animatie_mtangenta:=proc(f,x0,epsilon,Nmax,m)
local a,b,xn,x1,x2,n,df,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string)
,`, aproximatia initiala
x0=`, convert(x0,string),`, precizia = `, convert(epsilon,string));
df:=D(f); x1:=x0; xn:=[x1];
n:=0;x2:=x1-f(x1)/df(x1);
xn:=[op(xn),x2]; n:=n+1;
while (evalf(abs(x2-x1))>=epsilon)and
(n<Nmax) do
x1:=x2;x2:=x1-f(x1)/df(x1);xn:=[op(xn),x2];n:=n+1
od;
n:= nops(xn);
titlu:=cat(titlu,`\nSe deseneaza cu albastru
tangentele la grafic in
punctele (x[n], `,f,`(x[n])),
n=0..`,convert(n-2,string)); print(xn);
a:=min(seq(xn[i],i=1..n))-2*epsilon;
b:=max(seq(xn[i],i=1..n))+2*epsilon;
display(plot(f(t),t=a..b,color=COLOR(RGB,1,0,0),thickness=2,
labels=[X,Y],xtickmarks=map(evalf,xn)),display([seq(display(
pointplot([[xn[i],0],[xn[i],f(xn[i])]],connect=true,symbol=CIRCLE,
thickness=1,linestyle=DOT,
color=COLOR(RGB,0,0,0))$(3*m),
pointplot([[xn[i+1],0],[xn[i],f(xn[i])]],connect=true,thickness=1,
linestyle=SOLID, color=COLOR(RGB,0,0,1)))$m,
i=1..n-1)],title=titlu,insequence=true))
end;
Procedura animatie_mtangenta1 generează n cadre, în
fiecare cadru i fiind desenat graficul funcţiei şi tangentele la
grafic în punctele (xj, f(xj)) pentru j=1..i. Parametrul
suplimentar, m, este utilizat drept factor de încetinire.
> animatie_mtangenta1:=proc(f,x0,epsilon,Nmax,m)
local d,a,b,xn,x1,x2,n,df,titlu;
titlu:=cat(f,`:=x->`,convert(f(x),string) ,`,
aproximatia initiala
x0=`, convert(x0,string),`, precizia = `, convert(epsilon,string));
df:=D(f); x1:=x0; xn:=[x1];
n:=0;x2:=x1-f(x1)/df(x1);
xn:=[op(xn),x2]; n:=n+1;
while
(evalf(abs(x2-x1))>=epsilon)and (n<Nmax) do
x1:=x2;x2:=x1-f(x1)/df(x1);xn:=[op(xn),x2];n:=n+1
od;
n:= nops(xn);
titlu:=cat(titlu,`\nSe deseneaza cu albastru
tangentele la grafic in
punctele (x[n], `,f,`(x[n])),
n=0..`,convert(n-2,string));
print(xn); a:=min(seq(xn[i],i=1..n))-2*epsilon;
b:=max(seq(xn[i],i=1..n))+2*epsilon;
d:=plot(f(t),t=a..b,color=COLOR(RGB,1,0,0),thickness=2,
labels=[X,Y]);display(d,display([seq(display([seq(display(
pointplot([[xn[i],0],[xn[i],f(xn[i])]],connect=true,symbol=CIRCLE,
thickness=1,linestyle=DOT,
color=COLOR(RGB,0,0,0)),
pointplot([xn[i],f(xn[i])],symbol=CIRCLE,
thickness=15,color=COLOR(RGB,0,1,0)),pointplot([[xn[i+1],0],
[xn[i],f(xn[i])]],connect=true,thickness=1,
linestyle=SOLID,
color=COLOR(RGB,0,0,1))),i=1..j)])$m,
j=1..n-1)],title=titlu,insequence=true))
end;
Pentru exemplificare:
click pe definiţia funcţiilor de mai jos
3. Polinoame
de interpolare
Fie x0, x1, …, xn n+1 puncte distincte
două câte două din intervalul
[a, b] (numite noduri), şi fie yi =
f(xi) pentru orice i = 0,1,…n. Se numeşte polinom de interpolare
asociat nodurilor x0, x1, …, xn şi
valorilor y0=f(x0), y1= f(x1), …, yn=f(xn)
un polinom Pn care îndeplineşte următoarele condiţii
![]() grad(Pn)
£ n
grad(Pn)
£ n
Pn(xi) = yi, i =
0, 1, …, n .
Polinomul determinat de condiţiile anterioare există şi este
unic. Polinomul de interpolare asociat nodurilor x0, x1,
…, xn şi valorilor y0, y1, …, yn
poate fi scris sub forma
Ln(x) = 
numită formă Lagrange.
Următoarea procedură are drept parametrii o listă x de
noduri distincte două câte două,
o listă y de valori şi un punct a. Procedura întoarce valoarea
în a a polinomului de interpolarea asociat nodurilor din lista x şi valorilor
din lista y. Polinomul de interpolare este calculat utilizând scrierea lui sub
forma Lagrange.
>
polinom_Lagrange:=proc(x,y,a)
local
n,v,t,i,j;
n:=nops(x);v:=0;
for i
from 0 to n-1 do
t:=y[i+1];
for j
from 0 to i-1 do
t:=t*(a-x[j+1])/(x[i+1]-x[j+1])
od;
for j
from i+1 to n-1 do
t:=t*(a-x[j+1])/(x[i+1]-x[j+1])
od;
v:=v+t;
od;
RETURN(v)
end;
Eroare de interpolare. Comparaţie între nodurile echidistante şi
nodurile Cebîşev
Teorema următoare stabileşte eroarea cu care polinomul de
interpolare Pn aproximează funcţia f:
Teoremă
(eroarea de interpolare). Fie f :
[a, b] ® R o funcţie de clasă Cn+1.
Fie x0, x1, …, xn n+1 puncte distincte
două câte două din intervalul
[a, b], şi yi = f(xi) pentru orice i=0,1,…n.
Fie Pn polinomul de interpolare asociat nodurilor x0, x1,
…, xn şi valorilor y0=f(x0), y1=
f(x1), …, yn=f(xn). Atunci oricare ar fi xÎ[a,b], există zxÎ(a,b) astfel încât
f(x) – Pn(x) =  (x – x0) (x
– x1) … (x – xn).
(x – x0) (x
– x1) … (x – xn).
În
consecinţă, oricare ar fi x Î [a, b], avem:
| f(x) – Pn(x) | £ |(x – x0) (x – x1) … (x – xn)|.
|(x – x0) (x – x1) … (x – xn)|.
Fiind dat un interval [a, b], x0, x1, …, xn
se numesc noduri echidistante din intervalul [a, b] dacă
xi = a
+ ih, i = 0, 1, ...n, h = ![]() .
.
În cazul nodurilor echidistante se poate arăta că eroarea de
interpolare satisface:
| f(x) – Pn(x) | £ ![]()
![]() pentru orice xÎ[a, b].
pentru orice xÎ[a, b].
Pentru n Î N
dat, se numesc noduri Cebîşev (rădăcini ale
polinomului Cebîşev de prima speţă de grad n+1) numerele reale:
xi = ![]() , 0 £ i £ n.
, 0 £ i £ n.
Polinoamele Cebîşev de prima speţă pot fi definite recursiv
prin : T0(x) = 1, T1(x) = x, Tn+2(x) = 2xTn+1(x)
– Tn(x), n ³ 0, sau pot fi definite prin Tn(x)
= cos(n arccos(x)). Nodurile Cebîşev sunt proiecţiile pe axa OX a
unor puncte egal distanţate situate pe un semicerc:
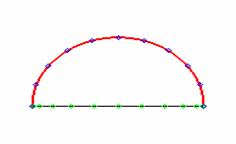
Nodurile Cebîşev au proprietatea că
|(x – x0)
(x – x1) … (x – xn)| £ ![]()
pentru orice xÎ [-1, 1]. Se poate arăta că pentru
oricare alte noduri ci, i=0, ...,n.
![]() |(x – c0) (x – c1) … (x – cn)|
³
|(x – c0) (x – c1) … (x – cn)|
³![]() .
.
Din acest motiv nodurile Cebîşev sunt considerate cele mai bune pentru
interpolare. Nodurile Cebîşev pot fi scalate şi translatate pentru a
putea fi folosite pe un interval oarecare [a, b]:
xi = ![]()
![]() +
+ ![]() , 0 £ i £ n.
, 0 £ i £ n.
Astfel în cazul nodurilor Cebîşev eroarea de interpolare este
| f(x) – Pn(x) | £  .
.
Procedura noduri_echidistante cu parametrii a, b şi n întoarce lista celor
n+1 noduri echidistante din intervalul [a, b]. Pentru n = 0 întoarce [(a+b)/2].
> noduri_echidistante:=proc(a,b,n)
if n=0 then RETURN([(a+b)/2]) else
RETURN([seq(a+(b-a)/n*i,i=0..n)])
fi
end;
Procedura noduri_Cebisev cu parametrii a, b şi n întoarce cele n+1 noduri Cebîşev
corespunzătoare intervalului [a, b].
> noduri_Cebisev:=proc(a,b,n)
RETURN([seq((b-a)/2*cos((2*i+1)/(2*n+2)*Pi)+(b+a)/2,i=0..n)])
end;
Convergenţa
Fie f : [a, b] ® R şi un şir de diviziuni Dn = (![]() ,
,![]() , …,
, …, ![]() ) ale intervalului [a,
b], n ³ 0. Pentru fiecare n se construieşte
polinomul de interpolare Pn asociat nodurilor
) ale intervalului [a,
b], n ³ 0. Pentru fiecare n se construieşte
polinomul de interpolare Pn asociat nodurilor ![]() ,
,![]() , …,
, …, ![]() şi valorilor
şi valorilor ![]() ,
,![]() , …,
, …, ![]() . Se pune problema convergenţei punctuale sau uniforme a
lui Pn la f. În general, Pn nu converge la f, însă
dacă f este o funcţie întreagă reală şirul de
polinoame Pn converge uniform la f.
. Se pune problema convergenţei punctuale sau uniforme a
lui Pn la f. În general, Pn nu converge la f, însă
dacă f este o funcţie întreagă reală şirul de
polinoame Pn converge uniform la f.
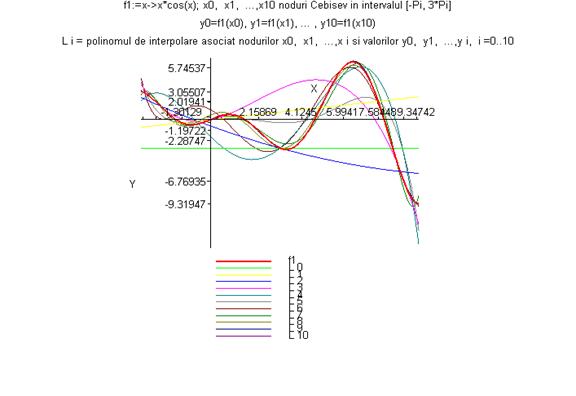
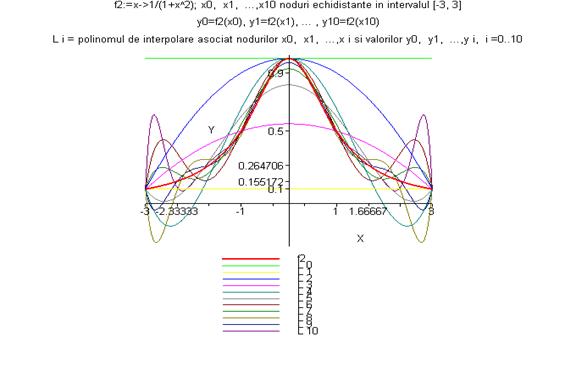
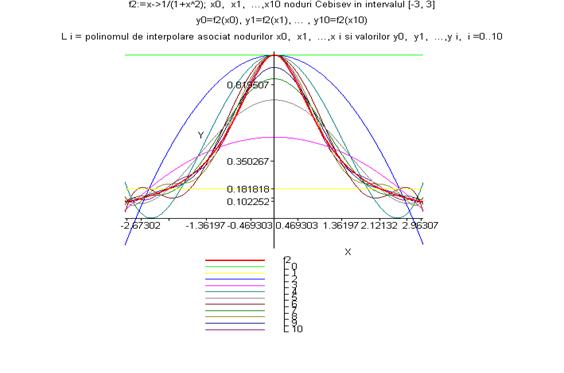
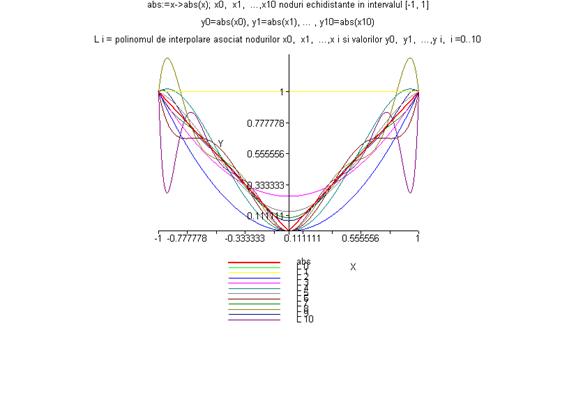
În cele ce urmează vom considera trei funcţii f1, f2,
f3 : R ® R, definite prin f1 (x)
=xcos(x), f2(x) = ![]() , respectiv f3(x) = |x|.
, respectiv f3(x) = |x|.
> f1:=x->x*cos(x);
![]()
> f2:=x->1/(1+x^2);
![]()
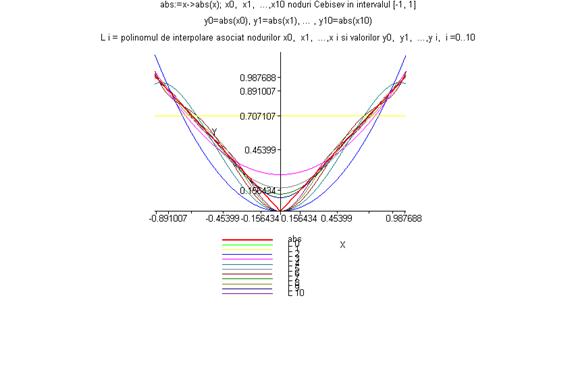
> f3:=x->abs(x);
![]()
Vom vizualiza comportarea polinoamelor de interpolare (sub forma Lagrange)
L0, L1,...,Ln asociate unor noduri ![]() ,
,![]() , …,
, …, ![]() şi valorilor
şi valorilor ![]() ,
,![]() , …,
, …, ![]() (cu exemplificări
pentru f Î {f1, f2, f3}).
(cu exemplificări
pentru f Î {f1, f2, f3}).
Procedura grafic_polinoame de mai jos reprezintă grafic n + 1 polinoamele de interpolare L0,
L1, ..., Ln. Parametrul tip al procedurii determină
ce fel de noduri se vor folosi (n + 1 noduri echidistante dacă tip = 1
şi n + 1 noduri Cebîşev
altfel). Ceilalţi parametri ai procedurii sunt funcţia f (care se aproximează prin polinoame de
interpolare), capetele intervalului [a, b] şi n care indică
numărul de noduri (n+1).
> grafic_polinoame:=proc(f,a,b,tip,n)
local
xn,yn,titlu,legenda;
if tip=1 then
xn:=[seq(noduri_echidistante(a,b,j),j=0..n)]
else xn:=[seq(noduri_Cebisev(a,b,j),j=0..n)] fi;
yn:=[seq(map(f,xn[j]),j=1..n+1)];
titlu:=cat(f,`:=x->`,convert(f(x),string) ,`; x0, x1,
..., x`,
convert(n,string),` noduri `);
if tip=1 then
titlu:=cat(titlu, `echidistante `)
else titlu:=cat(titlu, `Cebisev `) fi;
titlu:=cat(titlu, `in intervalul [`, convert(a,string), `,
`,convert(b,string),`]`);titlu:=cat(titlu,`\ny0=`,f,`(x0),
y1=`, f,
`(x1), ... ,
y`,convert(n,string),`=`,f,`(x`,convert(n,string), `)`);
titlu:=cat(titlu, `\nL
i = polinomul de interpolare asociat nodurilor
x0, x1, ...,x `,convert(i,string),` si valorilor
y0, y1,
...,y
`,convert(i,string), `, i
=0..`,convert(n,string));
legenda:=f,seq(cat(`L `,convert(j,string)),j=0..n);
plot([f(t),seq(polinom_Lagrange(xn[j],yn[j],t),j=1..n+1)],
t=a..b,labels=[X,Y],color=[COLOR(RGB,1,0,0),seq(COLOR(RGB,(1-
floor(log[5](j))/(floor(log[5](n))+1))*irem(irem(j,7)+1,2),(1-
floor(log[5](j))/(floor(log[5](n))+1))*irem(iquo(irem(j,7)+1,2),2),(1-
floor(log[5](j))/(floor(log[5](n))+1))*irem(iquo(irem(j,7)+1,4),2)),
j=1..n+1)],thickness=[2,seq(1,j=0..n)],legend=[legenda],title=titlu,
xtickmarks=map(evalf,xn[n]),ytickmarks=map(evalf,yn[n]));
end;
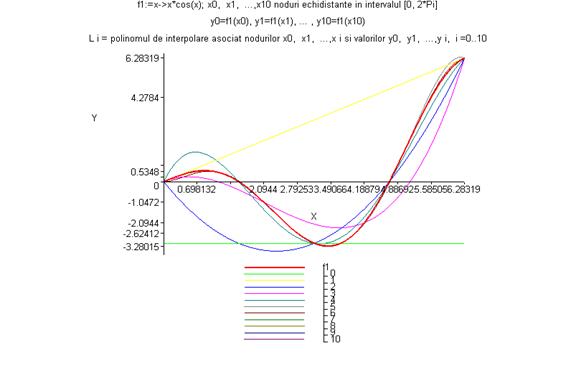
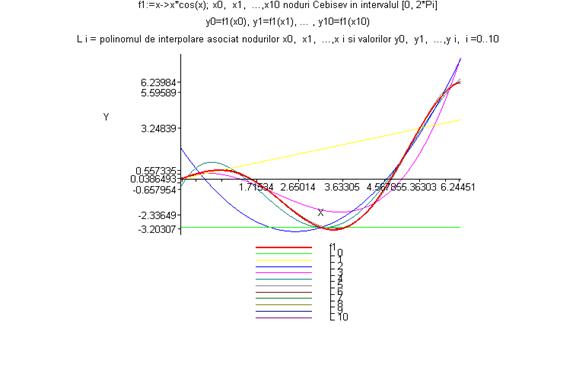
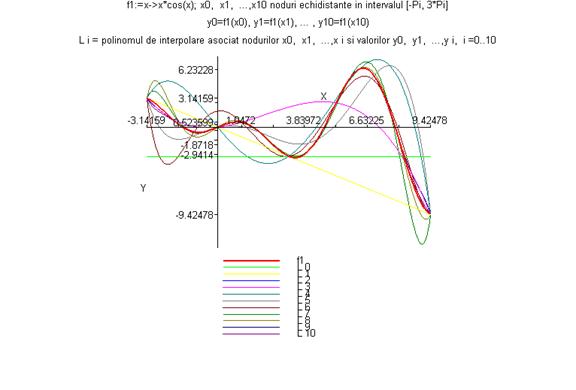
Aplicăm
procedura pentru funcţia f1 pe intervalele [0, 2p], [-p, 3p] , funcţia f2 pe
intervalul [-3, 3] şi funcţia f3 pe intervalul [-1, 1]. În
toate cazurile n = 10 şi se consideră două variante: noduri
echidistante şi noduri Cebîşev.
> grafic_polinoame(f1,0,2*Pi,1,10);
> grafic_polinoame(f1,0,2*Pi,2,10);
> grafic_polinoame(f1,-Pi,3*Pi,1,10);
> grafic_polinoame(f1,-Pi,3*Pi,2,10);
> grafic_polinoame(f2,-3,3,1,10);
> grafic_polinoame(f2,-3,3,2,10);
> grafic_polinoame(f3,-1,1,1,10);
> grafic_polinoame(f3,-1,1,2,10);
Prezentăm două variante animate ale
procedurii grafic_polinoame. Procedura animatie_polinoame1
generează
n+1 cadre, în fiecare cadru i (0 £ i £ n)
fiind desenat graficul funcţiei şi al polinomului de interpolare
asociat nodurilor ![]() ,
,![]() , …,
, …, ![]() (dacă parametrul
tip ia valoarea 1, atunci nodurile sunt echidistante, altfel sunt nodurile
Cebîşev asociate intervalului [a, b]). Parametrul suplimentar, m, este utilizat
drept factor de încetinire a animaţiei.
(dacă parametrul
tip ia valoarea 1, atunci nodurile sunt echidistante, altfel sunt nodurile
Cebîşev asociate intervalului [a, b]). Parametrul suplimentar, m, este utilizat
drept factor de încetinire a animaţiei.
> animatie_polinoame1:=proc(f,a,b,tip,n,m)
local xn,yn,titlu,d1,d2,d3;
if tip=1 then xn:=[seq(noduri_echidistante(a,b,j),j=0..n)]
else xn:=[seq(noduri_Cebisev(a,b,j),j=0..n)] fi;
yn:=[seq(map(f,xn[j]),j=1..n+1)];
titlu:=cat(f,`:=x->`,convert(f(x),string) ,`; x0, x1,
...,x`,
convert(n,string),` noduri `);
if tip=1 then titlu:=cat(titlu, `echidistante `)
else titlu:=cat(titlu, `Cebisev `) fi;
titlu:=cat(titlu, `in intervalul [`, convert(a,string), `, `,
convert(b,string),`]`);titlu:=cat(titlu,`\ny0=`,f,`(x0), y1=`,
f,
`(x1), ... ,
y`,convert(n,string),`=`,f,`(x`,convert(n,string), `)`);
titlu:=cat(titlu, `\nL i = polinomul de interpolare asociat
nodurilor
x0, x1, ...,x `,convert(i,string),` si valorilor
y0, y1,
..., y
`,convert(i,string),
`, i =0..`,convert(n,string));
titlu:=cat(titlu,`\nSe genereaza succesiv polinoamele L0, L1,
...,
L`,convert(n,string));
titlu:=cat(titlu,`\nPentru fiecare i, se marcheaza pe graficul
functiei `,f, ` punctele ( x j, `,f,` (xj) ), j = 0..i`);
d1:=plot(f(t), t=a..b,labels=[X,Y],color=COLOR(RGB,1,0,0),
thickness=2,title=titlu);
d2:=[seq([seq(pointplot([xn[j][i],yn[j][i]],symbol=circle,
color=black,thickness=15),i=1..j)],j=1..n+1)];
d3:=[seq(plot(polinom_Lagrange(xn[j],yn[j],t),t=a..b,labels=[X,Y],
color=COLOR(RGB,0,0,1),thickness=1),j=1..n+1)];
display(d1,display([seq(display(d2[j],d3[j])$m,j=1..n+1),
seq(display(d2[n+1-j],d3[n+1-j])$m,j=1..n)],insequence=true));
end;
Procedura animatie_polinoame2 generează n+1 cadre, în fiecare
cadru j (0 £ j £
n) fiind desenat graficul funcţiei şi al polinomelor de interpolare
asociate nodurilor ![]() ,
,![]() , …,
, …, ![]() cu i = 0..j.
Dacă parametrul tip ia valoarea 1, atunci nodurile sunt echidistante,
altfel sunt nodurile Cebîşev asociate intervalului [a, b]. Parametrul
suplimentar, m, este utilizat drept factor de încetinire a animaţiei.
cu i = 0..j.
Dacă parametrul tip ia valoarea 1, atunci nodurile sunt echidistante,
altfel sunt nodurile Cebîşev asociate intervalului [a, b]. Parametrul
suplimentar, m, este utilizat drept factor de încetinire a animaţiei.
> animatie_polinoame2:=proc(f,a,b,tip,n,m)
local xn,yn,titlu,d1,d2,d3;
if tip=1 then xn:=[seq(noduri_echidistante(a,b,j),j=0..n)]
else xn:=[seq(noduri_Cebisev(a,b,j),j=0..n)] fi;
yn:=[seq(map(f,xn[j]),j=1..n+1)];
titlu:=cat(f,`:=x->`,convert(f(x),string) ,`; x0, x1,
...,x`,
convert(n,string),` noduri `);
if tip=1 then titlu:=cat(titlu, `echidistante `)
else titlu:=cat(titlu, `Cebisev `) fi;
titlu:=cat(titlu, `in intervalul [`, convert(a,string), `, `,
convert(b,string),`]`);titlu:=cat(titlu,`\ny0=`,f,`(x0), y1=`,
f,
`(x1), ... ,
y`,convert(n,string),`=`,f,`(x`,convert(n,string), `)`);
titlu:=cat(titlu, `\nL i = polinomul de interpolare asociat
nodurilor
x0, x1, ...,x `,convert(i,string),` si valorilor
y0, y1,
..., y
`,convert(i,string), `, i
=0..`,convert(n,string));
titlu:=cat(titlu,`\nSe
genereaza succesiv polinoamele L0, L1, ...,
L`,convert(n,string));
titlu:=cat(titlu,`\nPentru
fiecare i, se marcheaza pe graficul functiei `,f, ` punctele ( x j, `,f,` (xj)
), j = 0..i`);
d1:=plot(f(t),
t=a..b,labels=[X,Y],color=COLOR(RGB,1,0,0),thickness=2,title=titlu);
d2:=[seq(pointplot([seq([xn[j][i],yn[j][i]],i=1..j)],symbol=circle,
color=black, thickness=15),j=1..n+1)];
d3:=[seq(plot([seq(polinom_Lagrange(xn[i],yn[i],t),i=1..j)],t=a..b,
labels=[X,Y],color=[seq(COLOR(RGB,(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(irem(i,7)+1,2),(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(iquo(irem(i,7)+1,2),2),(1-
floor(log[5](i))/(floor(log[5](n))+1))*irem(iquo(irem(i,7)+1,4),2)),
i=1..j)],thickness=[seq(1,i=1..j)]),j=1..n+1)];
display(d1,display([seq(display(d2[j],d3[j])$m,j=1..n+1),
seq(display(d2[n+1-j],d3[n+1-j])$m,j=1..n)],insequence=true));
end;
Procedura animatie_polinoame3 generează n+1 cadre, în fiecare
cadru i (0 £ i £
n) fiind desenat graficul funcţiei şi al celor două polinoamelor
de interpolare cu i noduri din intervalul [a, b]: unul corespunzător
nodurilor echidistante iar celălalt nodurilor Cebîşev. Parametrul
suplimentar, m, este utilizat drept factor de încetinire a animaţiei. Se
poate compara astfel comportarea polinoamelor asociate nodurilor Cebîşev
cu cele asociate nodurilor echidistante.
> animatie_polinoame3:=proc(f,a,b,n,m)
local xn,yn,xnc,ync,titlu,d1,d2,d3,d4,d5;
xn:=[seq(noduri_echidistante(a,b,j),j=0..n)];
xnc:=[seq(noduri_Cebisev(a,b,j),j=0..n)];
yn:=[seq(map(f,xn[j]),j=1..n+1)];
ync:=[seq(map(f,xnc[j]),j=1..n+1)];
titlu:=cat(f,`:=x->`,convert(f(x),string),` (grafic desenat
cu rosu) ;
intervalul [`, convert(a,string), `,
`,convert(b,string),`]`);titlu:=cat(titlu,`\nSe
compara polinoamele de
interpolare asociate nodurilor echidistante (grafice desenate
cu
albastru) \n cu
polinoamele de interpolare asociate nodurilor Cebisev
(grafice
desenate cu verde)`);
d1:=plot(f(t), =a..b,labels=[X,Y],color=COLOR(RGB,1,0,0),thickness=2,
title=titlu);
d2:=[seq([seq(pointplot([xn[j][i],yn[j][i]],symbol=circle,color=black,
thickness=15),i=1..j)],j=1..n+1)];
d3:=[seq(plot(polinom_Lagrange(xn[j],yn[j],t),t=a..b,labels=[X,Y],
color=COLOR(RGB,0,0,1),thickness=1),j=1..n+1)];
d4:=[seq([seq(pointplot([xnc[j][i],ync[j][i]],symbol=cross,
color=black, thickness=15),i=1..j)],j=1..n+1)];
d5:=[seq(plot(polinom_Lagrange(xnc[j],ync[j],t),t=a..b,
labels=[X,Y],color=COLOR(RGB,0,1,0),thickness=1),j=1..n+1)];
display(d1,display([seq(display(d2[j],d3[j],d4[j],d5[j])$m,j=1..n+1),
seq(display(d2[n+1-j],d3[n+1-j],d4[n+1-j],d5[n+1-j])$m,j=1..n)],
insequence=true));
end;
Pentru exemplificare:
click pe definiţia funcţiilor de mai jos
f1(x) = xcos(x), intervalul [0,
2p]
f1(x) = xcos(x), intervalul [-p, 3p]
f2(x) = ![]() , intervalul [-3, 3]
, intervalul [-3, 3]
f3(x)
= |x|,
intervalul [-1, 1]
Marian-Silviu Tălmăcel, marianns1@yahoo.comOana-Adriana BasarabăCristian-Laurenţiu Giorgi, giorgi_cristian@yahoo.com
Roxana-Elena Stăniloiu
Studenţi în anul I la Facultatea de Inginerie, Ingineria SistemelorUniversitatea Constatin Brâncuşi din Târgu-JiuBld. Republicii, Nr. 1, 210152 Târgu-Jiu, România. Lucrare prezentată la sesiunea de comunicări ştiinţifice studenţeşti din cadrul concursului naţional de matematică „Traian Lalescu”, Universitatea Politehnică Bucureşti, 30 mai – 1 iunie 2008.